





Mitä tulee siihen, miksi tyhjennystilaMOSFETitei käytetä, ei ole suositeltavaa päästä sen pohjalle.
Näissä kahdessa parannustilan MOSFETissä käytetään yleisemmin NMOS:a. Syynä on, että on-resistanssi on pieni ja helppo valmistaa. Siksi NMOS:ää käytetään yleisesti kytkentäteholähteissä ja moottorikäyttösovelluksissa. Seuraavassa johdannossa käytetään enimmäkseen NMOS:ää.
MOSFETin kolmen nastan välillä on loiskapasitanssi. Tätä emme tarvitse, vaan se johtuu valmistusprosessin rajoituksista. Parasiittisen kapasitanssin olemassaolo tekee siitä hankalampaa ohjauspiiriä suunniteltaessa tai valittaessa, mutta sitä ei voida välttää. Esittelemme sen tarkemmin myöhemmin.
Viemärin ja lähteen välissä on parasiittidiodi. Tätä kutsutaan runkodiodiksi. Tämä diodi on erittäin tärkeä ohjattaessa induktiivisia kuormia (kuten moottoreita). Muuten, runkodiodi on vain yhdessä MOSFETissä, eikä sitä yleensä löydy integroidun piirisirun sisältä.
2. MOSFET-johtavuusominaisuudet
Kytkimenä toimiva johtava väline, joka vastaa kytkimen sulkemista.
NMOS:n ominaisuus on, että se käynnistyy, kun Vgs on suurempi kuin tietty arvo. Se soveltuu käytettäväksi, kun lähde on maadoitettu (low-end drive), kunhan hilajännite saavuttaa 4V tai 10V.
PMOS:n ominaisuudet ovat, että se kytkeytyy päälle, kun Vgs on alle tietyn arvon, mikä sopii tilanteisiin, joissa lähde on kytketty VCC:hen (high-end drive). Kuitenkin vaikkaPMOSvoidaan helposti käyttää huippuluokan ajurina, NMOS:ää käytetään yleensä huippuluokan ajureissa suuren päällekkäisvastuksen, korkean hinnan ja harvojen vaihtotyyppien vuoksi.
3. MOS-kytkimen putken menetys
Olipa kyseessä NMOS tai PMOS, päällekytkennän jälkeen on päällä-vastus, joten virta kuluttaa energiaa tällä resistanssilla. Tätä osaa kulutetusta energiasta kutsutaan johtavuushäviöksi. MOSFETin valitseminen pienellä päällekytkeytymisresistanssilla vähentää johtavuushäviöitä. Nykypäivän pienitehoisen MOSFET-on-resistanssi on yleensä noin kymmeniä milliohmeja, ja niitä on myös useita milliohmeja.
Kun MOSFET käynnistetään ja sammutetaan, sitä ei saa suorittaa välittömästi. Jännite MOS:n yli laskee ja virtaava virta kasvaa. Tänä aikana,MOSFETithäviö on jännitteen ja virran tulo, jota kutsutaan kytkentähäviöksi. Yleensä kytkentähäviöt ovat paljon suurempia kuin johtavuushäviöt, ja mitä nopeampi kytkentätaajuus, sitä suuremmat häviöt.
Jännitteen ja virran tulo johtamishetkellä on erittäin suuri, mikä aiheuttaa suuria häviöitä. Kytkentäajan lyhentäminen voi vähentää häviötä jokaisen johtumisen aikana; kytkentätaajuuden vähentäminen voi vähentää kytkinten määrää aikayksikköä kohti. Molemmat menetelmät voivat vähentää kytkentähäviöitä.
Aaltomuoto, kun MOSFET on päällä. Voidaan nähdä, että jännitteen ja virran tulo johtamishetkellä on erittäin suuri, ja myös aiheutuva häviö on erittäin suuri. Kytkentäajan lyhentäminen voi vähentää häviötä jokaisen johtumisen aikana; kytkentätaajuuden vähentäminen voi vähentää kytkinten määrää aikayksikköä kohti. Molemmat menetelmät voivat vähentää kytkentähäviöitä.
4. MOSFET-ohjain
Verrattuna bipolaarisiin transistoreihin uskotaan yleisesti, että MOSFETin käynnistämiseen ei tarvita virtaa, kunhan GS-jännite on korkeampi kuin tietty arvo. Tämä on helppo tehdä, mutta tarvitsemme myös nopeutta.
MOSFETin rakenteesta voidaan nähdä, että GS:n ja GD:n välillä on loiskapasitanssi, ja MOSFETin käyttö on itse asiassa kondensaattorin latausta ja purkamista. Kondensaattorin lataaminen vaatii virran, koska kondensaattoria voidaan pitää oikosulkuna lataushetkellä, joten hetkellinen virta on suhteellisen suuri. Ensimmäinen asia, johon on kiinnitettävä huomiota valittaessa/suunnitellessa MOSFET-ohjainta, on sen hetkellisen oikosulkuvirran määrä.
Toinen huomioitava asia on, että NMOS, jota käytetään yleisesti huippuluokan ajamiseen, tarvitsee hilajännitteen olevan suurempi kuin lähdejännite, kun se on päällä. Kun yläpuolella ohjattu MOSFET on päällä, lähdejännite on sama kuin nielujännite (VCC), joten hilajännite on 4 V tai 10 V suurempi kuin VCC tällä hetkellä. Jos haluat saada VCC:tä suuremman jännitteen samassa järjestelmässä, tarvitset erityisen tehostuspiirin. Monissa moottoriajureissa on integroidut latauspumput. On huomattava, että sopiva ulkoinen kondensaattori tulee valita riittävän oikosulkuvirran saamiseksi MOSFETin ohjaamiseen.
Yllä mainittu 4V tai 10V on yleisesti käytettyjen MOSFETien käynnistysjännite, ja tietysti suunnittelun aikana on sallittava tietty marginaali. Ja mitä suurempi jännite, sitä suurempi johtavuusnopeus ja pienempi johtavuusvastus. Nyt eri aloilla on käytössä pienemmillä johtavuusjännitteillä varustettuja MOSFETejä, mutta 12V autoelektroniikkajärjestelmissä yleensä 4V johtavuus riittää.
Lisätietoja MOSFET-ohjainpiiristä ja sen häviöistä on kohdassa Microchipin AN799 Matching MOSFET Drivers to MOSFETs. Se on hyvin yksityiskohtainen, joten en kirjoita enempää.
Jännitteen ja virran tulo johtamishetkellä on erittäin suuri, mikä aiheuttaa suuria häviöitä. Kytkentäajan lyhentäminen voi vähentää häviötä jokaisen johtumisen aikana; kytkentätaajuuden vähentäminen voi vähentää kytkinten määrää aikayksikköä kohti. Molemmat menetelmät voivat vähentää kytkentähäviöitä.
MOSFET on FET-tyyppi (toinen on JFET). Siitä voidaan tehdä parannustila tai tyhjennystila, P-kanava tai N-kanava, yhteensä 4 tyyppiä. Kuitenkin vain parannustilan N-kanavainen MOSFET on todellisuudessa käytössä. ja parannustyypin P-kanavainen MOSFET, joten NMOS tai PMOS viittaavat yleensä näihin kahteen tyyppiin.
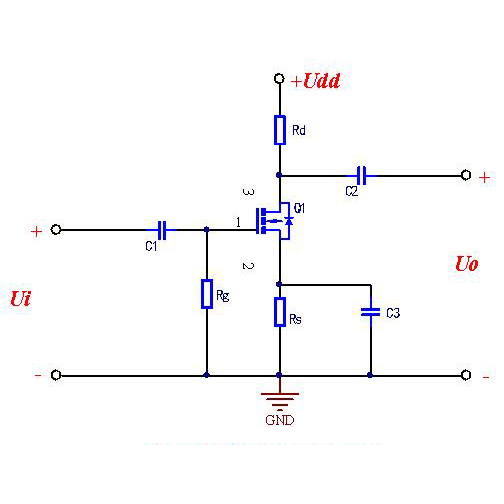
5.MOSFET-sovelluspiiri?
MOSFETin merkittävin ominaisuus on sen hyvät kytkentäominaisuudet, joten sitä käytetään laajalti elektronisia kytkimiä vaativissa piireissä, kuten hakkuriteholähteet ja moottorikäytöt sekä valaistuksen himmennys.
Nykypäivän MOSFET-ajureilla on useita erityisvaatimuksia:
1. Pienjännitesovellus
5V virtalähdettä käytettäessä, jos tällä hetkellä käytetään perinteistä toteemipylväsrakennetta, koska transistorin jännitehäviö on noin 0,7 V, on todellinen hilalle syötetty lopullinen jännite vain 4,3 V. Tällä hetkellä valitsemme portin nimellistehon
4,5 V MOSFETin käyttöön liittyy tietty riski. Sama ongelma ilmenee myös käytettäessä 3V tai muita pienjännitelähteitä.
2. Laaja jännitesovellus
Tulojännite ei ole kiinteä arvo, se muuttuu ajan tai muiden tekijöiden mukaan. Tämä muutos aiheuttaa sen, että PWM-piirin MOSFETille tarjoama käyttöjännite on epävakaa.
Jotta MOSFETit olisivat turvallisia korkeilla hilajännitteillä, monissa MOSFET:issä on sisäänrakennetut jännitesäätimet, jotka rajoittavat voimakkaasti hilajännitteen amplitudia. Tässä tapauksessa, kun annettu käyttöjännite ylittää jännitteensäädinputken jännitteen, se aiheuttaa suuren staattisen virrankulutuksen.
Samaan aikaan, jos käytät yksinkertaisesti vastuksen jännitteen jaon periaatetta hilajännitteen pienentämiseen, MOSFET toimii hyvin, kun tulojännite on suhteellisen korkea, mutta kun tulojännitettä pienennetään, hilajännite on riittämätön, mikä aiheuttaa epätäydellinen johtuminen, mikä lisää virrankulutusta.
3. Kaksoisjännitesovellus
Joissakin ohjauspiireissä logiikkaosa käyttää tyypillistä 5V tai 3,3V digitaalista jännitettä, kun taas tehoosa käyttää 12V tai jopa korkeampaa jännitettä. Kaksi jännitettä on kytketty yhteiseen maahan.
Tämä nostaa vaatimuksen käyttää piiriä niin, että pienjännitepuoli voi ohjata tehokkaasti korkeajännitepuolen MOSFETiä. Samanaikaisesti korkeajännitepuolen MOSFET kohtaa myös kohdissa 1 ja 2 mainitut ongelmat.
Näissä kolmessa tapauksessa toteeminaparakenne ei voi täyttää lähtövaatimuksia, ja monet valmiit MOSFET-ohjainpiirit eivät näytä sisältävän hilajännitteen rajoittavia rakenteita.
Joten suunnittelin suhteellisen yleisen piirin vastaamaan näihin kolmeen tarpeeseen.
Ajuripiiri NMOS:lle
Tässä teen vain yksinkertaisen analyysin NMOS-ohjainpiiristä:
Vl ja Vh ovat vastaavasti low-end ja high-end virtalähteitä. Nämä kaksi jännitettä voivat olla samat, mutta Vl ei saa ylittää Vh:ta.
Q1 ja Q2 muodostavat käänteisen toteemipavan eristyksen saavuttamiseksi varmistaen samalla, että kaksi ohjausputkea Q3 ja Q4 eivät käynnisty samanaikaisesti.
R2 ja R3 tarjoavat PWM-jännitteen referenssin. Tätä referenssiä muuttamalla piiriä voidaan käyttää asennossa, jossa PWM-signaalin aaltomuoto on suhteellisen jyrkkä.
Q3 ja Q4 käytetään tuottamaan käyttövirtaa. Kun ne on kytketty päälle, Q3:lla ja Q4:llä on vain minimijännitehäviö Vce suhteessa Vh:hen ja GND:hen. Tämä jännitehäviö on yleensä vain noin 0,3 V, mikä on paljon pienempi kuin Vce 0,7 V.
R5 ja R6 ovat takaisinkytkentävastuksia, joita käytetään näytteenottoon hilajännitteestä. Näytteistetty jännite synnyttää vahvan negatiivisen takaisinkytkennän Q1:n ja Q2:n kansoihin Q5:een, rajoittaen siten hilajännitteen rajoitettuun arvoon. Tätä arvoa voidaan säätää R5:llä ja R6:lla.
Lopuksi R1 tarjoaa perusvirtarajan Q3:lle ja Q4:lle ja R4 tarjoaa hilavirran rajan MOSFETille, joka on Q3:n ja Q4:n jään raja. Tarvittaessa kiihdytyskondensaattori voidaan kytkeä rinnan R4:n kanssa.
Tämä piiri tarjoaa seuraavat ominaisuudet:
1. Käytä matalan puolen jännitettä ja PWM:ää korkean puolen MOSFETin ohjaamiseen.
2. Käytä pienen amplitudin PWM-signaalia ohjaamaan MOSFETiä, jolla on korkeat hilajännitteen vaatimukset.
3. Hilajännitteen huippuraja
4. Tulo- ja lähtövirran rajat
5. Sopivia vastuksia käyttämällä voidaan saavuttaa erittäin alhainen virrankulutus.
6. PWM-signaali on käänteinen. NMOS ei tarvitse tätä ominaisuutta ja se voidaan ratkaista sijoittamalla invertteri eteen.
Suunnittelijoiden on kohdattava kannettavia laitteita ja langattomia tuotteita suunniteltaessa tuotteen suorituskyvyn parantaminen ja akun käyttöiän pidentäminen. DC-DC-muuntimien etuna on korkea hyötysuhde, suuri lähtövirta ja pieni lepovirta, mikä tekee niistä erittäin sopivia kannettavien laitteiden virransyöttöön. Tällä hetkellä DC-DC-muuntimen suunnittelutekniikan kehityksen päätrendit ovat: (1) Korkeataajuustekniikka: Kun kytkentätaajuus kasvaa, myös kytkentämuuntimen koko pienenee, tehotiheys myös kasvaa huomattavasti, ja dynaaminen vaste paranee. . Pienitehoisten DC-DC-muuntimien kytkentätaajuus nousee megahertsitasolle. (2) Matala lähtöjännitetekniikka: Puolijohteiden valmistustekniikan jatkuvan kehityksen myötä mikroprosessorien ja kannettavien elektronisten laitteiden käyttöjännite laskee ja laskee, mikä edellyttää tulevilta DC-DC-muuntimista pientä lähtöjännitettä sopeutuakseen mikroprosessoreihin. vaatimukset prosessoreille ja kannettaville elektronisille laitteille.
Näiden tekniikoiden kehitys on asettanut korkeampia vaatimuksia tehosirupiirien suunnittelulle. Ensinnäkin kytkentätaajuuden kasvaessa edelleen kytkentäelementtien suorituskyvylle asetetaan korkeat vaatimukset. Samanaikaisesti on järjestettävä vastaavat kytkinelementtien käyttöpiirit varmistamaan, että kytkinelementit toimivat normaalisti kytkentätaajuuksilla MHz asti. Toiseksi akkukäyttöisissä kannettavissa elektronisissa laitteissa piirin käyttöjännite on alhainen (esimerkiksi litiumakkujen käyttöjännite on 2,5–3,6 V), joten virtapiirin käyttöjännite on alhainen.
MOSFETillä on erittäin pieni päällekytkentävastus ja se kuluttaa vähän energiaa. MOSFETiä käytetään usein virtakytkimenä tällä hetkellä suosituissa korkean hyötysuhteen DC-DC-siruissa. MOSFETin suuresta loiskapasitanssista johtuen NMOS-kytkentäputkien hilakapasitanssi on kuitenkin yleensä jopa kymmeniä pikofaradeja. Tämä asettaa korkeammat vaatimukset korkean toimintataajuuden DC-DC-muuntimen kytkentäputkikäyttöpiirin suunnittelulle.
Pienjännite-ULSI-malleissa on useita CMOS- ja BiCMOS-logiikkapiirejä, jotka käyttävät bootstrap-tehostusrakenteita ja käyttöpiirejä suurina kapasitiivisina kuormina. Nämä piirit voivat toimia normaalisti alle 1 V:n tehonsyöttöjännitteellä, ja ne voivat toimia kymmenien megahertsien tai jopa satojen megahertsien taajuudella kuormakapasitanssilla 1–2 pF. Tässä artikkelissa käytetään bootstrap-tehostuspiiriä suunnitellakseen taajuusmuuttajapiirin suurella kuormakapasitanssilla, joka soveltuu matalajännitteisille, korkean kytkentätaajuuden tehostettaville DC-DC-muuntimille. Piiri on suunniteltu Samsung AHP615 BiCMOS -prosessin perusteella ja varmistettu Hspice-simulaatiolla. Kun syöttöjännite on 1,5 V ja kuormakapasitanssi 60 pF, toimintataajuus voi olla yli 5 MHz.
MOSFET-kytkentäominaisuudet
1. Staattiset ominaisuudet
Kytkinelementtinä MOSFET toimii myös kahdessa tilassa: pois tai päällä. Koska MOSFET on jänniteohjattu komponentti, sen toimintatilan määrää pääasiassa hilalähdejännite uGS.
Toimintaominaisuudet ovat seuraavat:
※ uGS<käynnistysjännite UT: MOSFET toimii katkaisualueella, nielulähdevirta iDS on periaatteessa 0, lähtöjännite uDS≈UDD ja MOSFET on "off"-tilassa.
※ uGS>Päällekytkentäjännite UT: MOSFET toimii johtavuusalueella, nielulähdevirta iDS=UDD/(RD+rDS). Niistä rDS on tyhjennyslähteen vastus, kun MOSFET on päällä. Lähtöjännite UDS=UDD?rDS/(RD+rDS), jos rDS<<RD, uDS≈0V, MOSFET on "on"-tilassa.
2. Dynaamiset ominaisuudet
MOSFETillä on myös siirtymäprosessi päälle- ja poiskytkentätilojen välillä, mutta sen dynaamiset ominaisuudet riippuvat pääasiassa ajasta, joka tarvitaan virtapiiriin liittyvän hajakapasitanssin lataamiseen ja purkamiseen sekä varauksen kertymisestä ja purkautumisesta, kun itse putki on päällä ja pois päältä. Hajoamisaika on hyvin pieni.
Kun tulojännite ui muuttuu korkeasta matalaksi ja MOSFET muuttuu päällä-tilasta pois-tilasta, teholähde UDD lataa hajakapasitanssin CL RD:n kautta ja latausaikavakion t1=RDCL. Siksi lähtöjännitteen uo on käytävä läpi tietty viive ennen kuin se muuttuu matalalta tasolta korkealle; kun tulojännite ui muuttuu matalasta korkeaksi ja MOSFET muuttuu off-tilasta päällä-tilaan, hajakapasitanssin CL varaus kulkee rDS:n läpi. Purkaus tapahtuu purkausaikavakiolla τ2≈rDSCL. Voidaan nähdä, että myös lähtöjännite Uo tarvitsee tietyn viiveen ennen kuin se voi siirtyä matalalle tasolle. Mutta koska rDS on paljon pienempi kuin RD, muunnosaika rajasta johtoon on lyhyempi kuin muunnosaika johtumisesta katkaisuun.
Koska MOSFETin nielulähteen resistanssi rDS, kun se on päällä, on paljon suurempi kuin transistorin kyllästysvastus rCES ja ulkoinen tyhjennysvastus RD on myös suurempi kuin transistorin kollektorin vastus RC, lataus- ja purkuaika MOSFET on pidempi, jolloin MOSFET Kytkentänopeus on pienempi kuin transistorin. Kuitenkin CMOS-piireissä, koska latauspiiri ja purkauspiiri ovat molemmat pieniresistanssisia piirejä, lataus- ja purkuprosessit ovat suhteellisen nopeita, mikä johtaa suureen kytkentänopeuteen CMOS-piirissä.
-
Suuren paketin MOSFET-ohjainpiiri
-
Mikä on pienjännitteisten MOSFETien rooli?
-

Mikä MOSFET-merkki on hyvä
-

Kuinka määrittää nMOSFETit ja pMOSFETit
-
Oikea tapa valita MOSFETit
-

Täydellinen MOSFET-vahvistimien opas: alkaen B...
-

Kuinka valita sopivin ohjainpiiri ...
-

Tiedätkö MOSFET-ohjainpiirin?
-

MOSFETin perustunnistus ja testaus
-

Kerro lyhyesti h...
-

MOSFET-portin lähteen suojaus
-

Kuinka määrittää, että suuritehoinen MOSFET on palanut...
-

MOSFETin perusymmärrys
-
MOSFETien kolme pääroolia
-

Kuinka estää MOSFET-vika
-

Tiesitkö MOSFETin kehityksestä?



